Robot a rilevazione di ostacoli
Progettazione di un robot a rilevazione di ostacoli
Il robot a rilevazione di ostacoli, è il nome di un progetto nato con l’intento di realizzare un automa in grado di muoversi autonomamente nello spazio, riconoscendo gli eventuali ostacoli e la mancanza del pavimento durante la sua marcia.
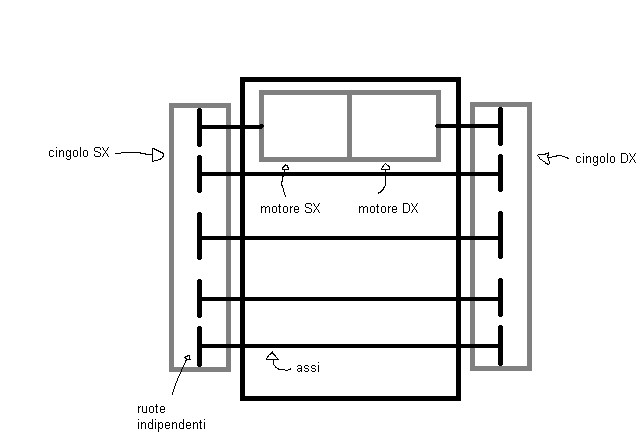
Il sistema mobile è realizzato da un robot a 2 cingoli. Il moto a cingoli è trasmesso da due motori a spazzole in corrente continua indipendenti (N.B.= non sono motori passo-passo).
Per eseguire una svolta a destra, basta far ruotare il motore di destra e quindi il cingolo destro in senso antiorario, e quello il motore di sinistra e quindi il cingolo sinistro in senso orario. Per la svolta a sinistra bisogna invertire le rotazioni.
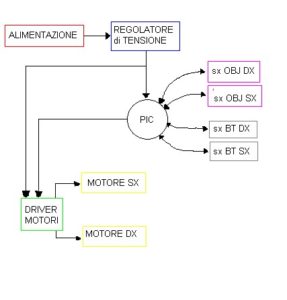
SCHEMA A BLOCCHI
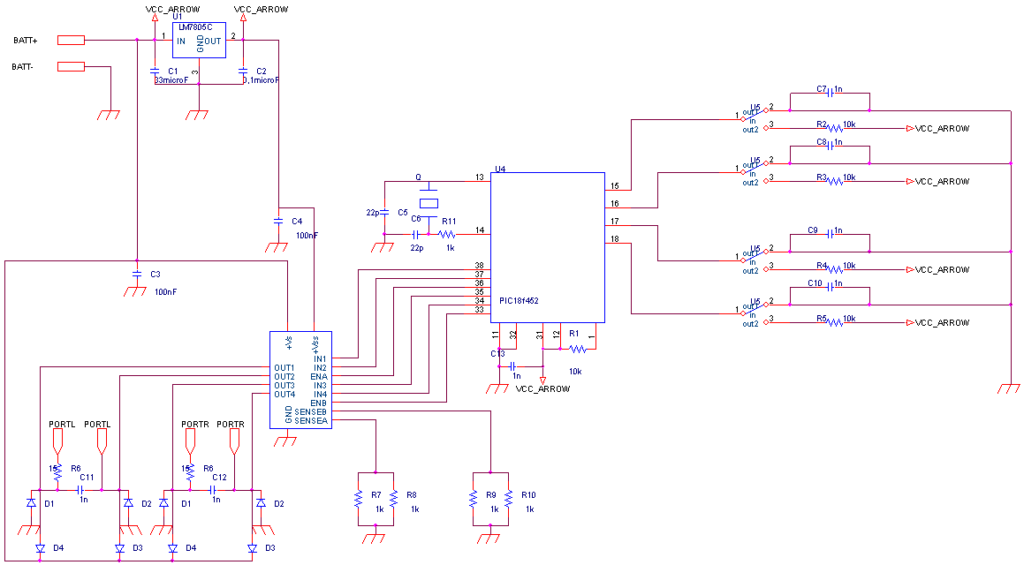
SCHEMA ELETTRICO